【B#266】コンピュータはどのように月へ行ったのか──アポロ計画の本質〜アポロ計画⑦
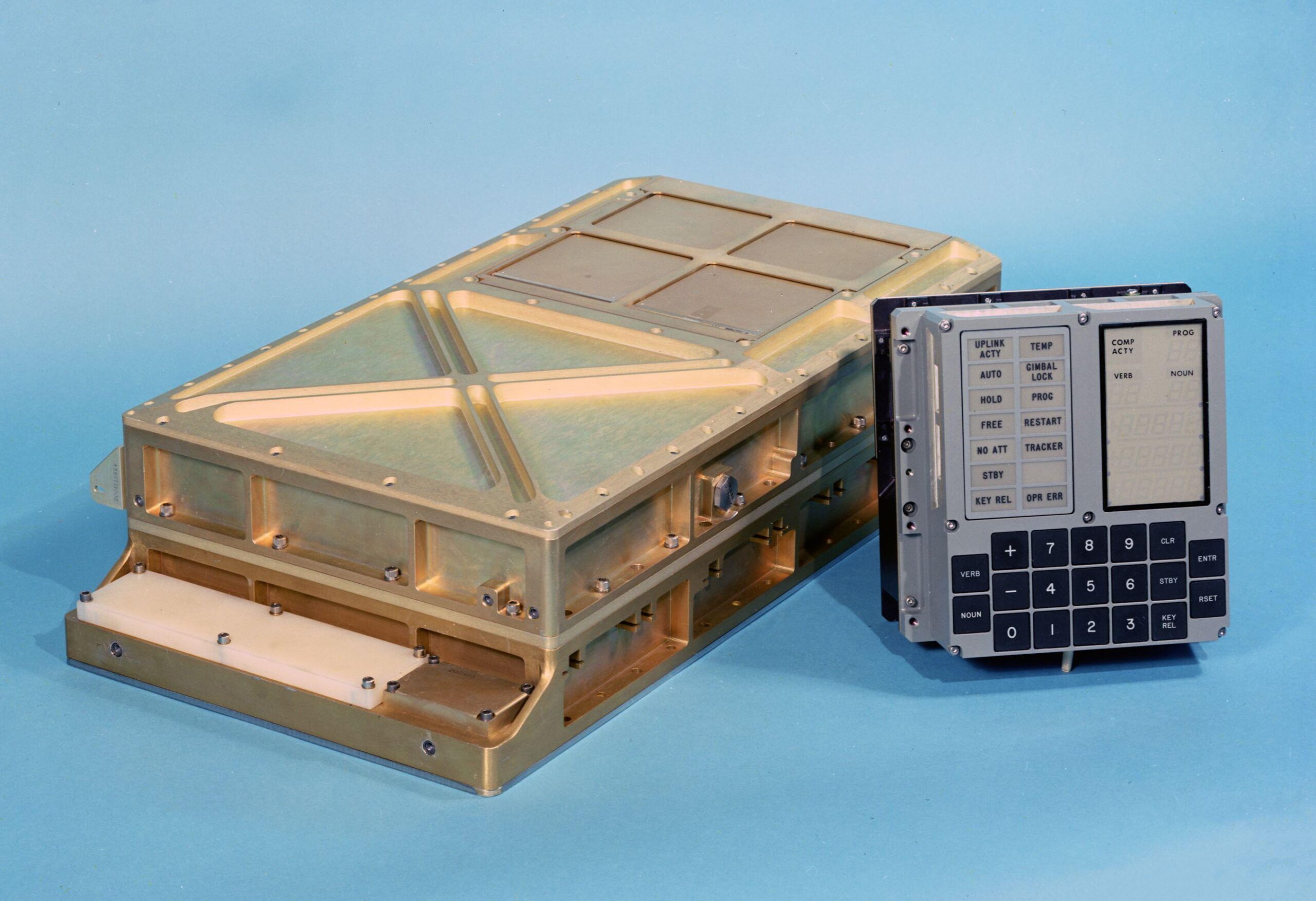
Table of Contents
はじめに
アポロ計画という言葉を聞いたとき、多くの人が思い浮かべるのは、巨大なロケット「サターンV」や、月面に立つ宇宙飛行士の姿であろう。
人類が初めて月に到達したこの出来事は、しばしば「ロケット技術の勝利」として語られる。確かに、それは間違いではない。あの巨大な推進力なくして、地球の重力圏を脱することは不可能であった。しかし、その一方で、あまり語られることのないもう一つの側面がある。それは、コンピュータと半導体が果たした役割である。
1960年代初頭、コンピュータはまだ黎明期にあった。装置は巨大で、消費電力も大きく、信頼性も十分とは言えない。今日のように、手のひらの中に収まる存在ではなく、むしろ「特別な環境でしか扱えない機械」であった。
そのような時代において、NASAは極めて大胆な決断を下す。
それは、コンピュータを宇宙船の中枢に据えるという選択である。単なる補助的な計算装置ではない。飛行の制御、軌道の計算、さらには月面への降下といった極めて重要な局面において、コンピュータに判断の一部を委ねるという構造を採用したのである。
ここに、アポロ計画の本質的な革新がある。
この点について、MITの科学史研究者であり『デジタルアポロ・月をめざぜ 人と機械の挑戦(原書:Digital Apollo)』の著者であるデビット・ミンデル(David A. Mindell) は、アポロ計画を単なる宇宙開発ではなく、「人間とコンピュータの関係を再設計したプロジェクト」として位置づけている。
つまりアポロとは、ロケットによる宇宙開発であると同時に、デジタル技術による意思決定の拡張の試みであったと言える。
さらに重要なのは、このコンピュータが単独で機能していたわけではないという点である。
- MITドレイパー研究所による設計思想
- フェアチャイルドによる半導体の供給
- 現場でのワイアリング作業
- ソフトウェア開発を担ったエンジニアたち
そして、その多くの場面において、女性たちが重要な役割を担っていたという事実がある。
アポロ計画は、単一の技術によって成し遂げられたものではない。それは、異なる専門領域と、多様な人々の関与が重なり合うことで成立した巨大な統合システムであった。
今回のブログでは、『Digital Apollo』およびNASAの公開資料をもとに、コンピュータがアポロ計画に果たした役割について、技術と人間の両面から丁寧に整理する。ロケットの物語の背後にある、もう一つのアポロ──すなわち、デジタル・アポロの実像に迫っていきたい。
なぜアポロにコンピュータが必要だったのか
アポロ計画において問われていたのは、単に宇宙へ到達することではない。その本質は「制御できる宇宙飛行」を実現することにあった。ロケットを打ち上げるだけであれば、弾道計算によってある程度は実現できる。しかしアポロが目指したのは、それとはまったく異なる次元のミッションである。
- 地球軌道への投入
- 月軌道への遷移
- 月面への降下
- 再上昇およびドッキング
- 地球への帰還
これら一連のプロセスは、事前に完全に固定された軌道では対応できない。なぜなら、宇宙空間には常に不確実性が存在するからである。
- 微小な軌道誤差
- 推進系のばらつき
- 重力場の影響
- センサーの誤差
こうした要素が積み重なることで、わずかなズレが致命的な結果につながる。したがって、必要とされたのは、状況に応じて修正し続ける「動的な制御システム」であった。
地上からの制御の限界
では、その制御をすべて地上から行えばよいのだろうか。理論的には可能である。しかし実際には、大きな制約が存在する。最も重要なのは、通信遅延である。地球と月の距離は約38万km。信号は光速で伝わるが、それでも往復で数秒の遅れが生じる。
この遅延は、姿勢制御、エンジン制御、着陸時の微調整といったリアルタイム性が求められる場面においては致命的である。
つまり、地上からの指示だけでは、月面着陸は成立しないという結論に至る。
宇宙船自身が「判断する」という発想
ここでNASAが選択したのが、宇宙船の内部に判断機構を持たせるという設計であった。それが、コンピュータである。この決断の意味は大きい。それまでの工学システムにおいて、機械はあくまで人間の指示に従う存在であった。
しかしアポロでは、機械が状況を計算し、判断の一部を担うという構造が導入された。これは単なる技術的進歩ではない。意思決定の構造そのものの変化である。
ここで重要なのは、コンピュータの位置づけである。アポロにおいてコンピュータは、計算の補助、データ処理装置といった役割にとどまらない。むしろ、飛行の成立そのものに不可欠な存在であった。
たとえば、
- 姿勢を維持する
- 推力を調整する
- 軌道を再計算する
これらはすべて、コンピュータなしでは実現できない。つまり、アポロは「コンピュータとともに飛ぶ宇宙船」であったと言える。
人間との関係──完全自動ではない設計
ただし、ここで重要なのは、完全自動化が目指されたわけではないという点である。アポロの設計思想は、すべてを機械に任せるのでもなく、すべてを人間が担うのでもない。両者の役割を明確に分け、統合するというものであった。
宇宙飛行士は、必要に応じて手動操作を行い、コンピュータの判断を確認し、最終的な意思決定を担う。
コンピュータは、高速な計算、リアルタイム制御、エラー検出を担当する。
この関係は、現代のAIと人間の関係の原型とも言える。
小さなコンピュータに課された巨大な責任
ここで一つの問題がある。それは、当時のコンピュータは極めて非力だったという事実である。メモリは数KB。処理能力も限られている。それにもかかわらず、宇宙船の命運を担う役割を与えられたのである。
この矛盾をどう解決したのか。その答えが、極限まで洗練された設計思想であった。
- 必要最小限の機能
- シンプルな構造
- エラーに強い設計
この思想が、後にAGC(Apollo Guidance Computer)という形で結実することになる。
アポロ計画においてコンピュータは、単なる計算装置ではなかった。それは、宇宙飛行を成立させるための「意思決定システム」であり、人間と機械の新しい関係を体現する存在であった。そしてこの発想こそが、現代のデジタル社会の原点につながっている。
MITドレイパー研究所はいかにしてNASAの信頼を獲得したのか
アポロ計画において、NASAは極めて重要な意思決定を行っている。それは、誘導・航法・制御(Guidance, Navigation, Control:GN&C)という中枢機能を、外部組織に委ねるという決断である。
その対象は、政府機関でも大企業でもなく、MITの一研究所であった。なぜNASAは、このような大胆な選択を行ったのだろうか。その背景には、チャールズ・スターク・ドレイパー が築いてきた、独自の実績と信頼がある。
潜水艦における慣性航法──外界から切断された世界
この技術が決定的な意味を持ったのが、潜水艦の運用である。潜水艦は、水中に潜ることで、無線通信が制限される、GPSのような外部測位が使えないという環境に置かれる。
つまり、外界から切り離された状態で、自らの位置を把握し続ける必要があるこの問題に対する解として発展したのが、慣性航法システムであった。加速度、角速度、をもとに、自らの位置と姿勢を計算し続けるこの技術は、宇宙船と極めて本質的に似た条件を持っている。外部に頼れない。誤差が積み重なる。それでも動き続けなければならない。
この経験は、宇宙空間における航法の原型となった。
ミサイル・航空機への応用──リアルタイム制御
さらにドレイパー研究所は、弾道ミサイル、航空機制御といった分野でも実績を積み上げていた。これらに共通するのは、リアルタイムでの制御が不可欠であるという点である。姿勢を維持する、軌道を修正する、不安定な状態を安定させる。
こうした処理は、瞬時の判断と継続的なフィードバックを必要とする。つまり彼らはすでに「動き続けるシステム」を扱う技術と経験を持っていたのである。
ドレイパーのもう一つの特徴は、その徹底した実践主義にある。彼は、自ら航空機に搭乗し、システムをテストする人物であった。
この姿勢は研究所全体に浸透しており、理論だけで終わらない、実際に動くことを最優先するという文化を形成していた。
NASAが必要としていたのは、「正しい理論」ではなく、「確実に機能するシステム」である。この点において、ドレイパー研究所は他に代えがたい存在であった。
「部分」ではなく「全体」を設計する能力
アポロ計画の難しさは、個々の技術ではない。問題は、それらを一つのシステムとして統合することにあった。センサー、コンピュータ、推進系、人間の操作これらはすべて、リアルタイムで相互に影響し合う。
ドレイパー研究所は、これまでの経験を通じて、全体を一つのシステムとして設計する能力を持っていた。NASAが求めていたのは、部品の専門家ではなく、「システムの設計者」であった。
「任せる」という決断
こうした背景のもと、NASAは最終的に決断する。GN&Cシステム全体をMITに一任するこれは単なる技術委託ではない。意思決定の中枢を外部に委ねるという極めて大胆な判断である。
その裏には、潜水艦での航法、ミサイル制御、航空機システム、実装力と現場主義という積み重ねによって築かれた、揺るぎない信頼が存在していた。
当時の技術は決して完成されたものではなかった。コンピュータは故障する、計算能力は限られている。それでもドレイパー研究所は、「完璧な機械」を目指さなかった。むしろ、不完全でも機能し続けるシステムを設計した。
この思想は、優先順位制御、エラー処理、冗長性、といった形で具現化され、後のAGCへとつながっていく。
小まとめ
MITドレイパー研究所がNASAの信頼を獲得した理由は明確である。それは、極限環境で動くシステムを作ってきた実績であり、潜水艦・ミサイル・航空機における統合技術の蓄積であり、理論ではなく現実を優先する文化であった。
NASAはこの力を見抜き、宇宙船の「意思決定の中枢」を委ねたのである。そしてこの決断こそが、アポロ計画の成功を支えた基盤となったと言えるだろう。
Apollo Guidance Computerという革新──限界と精度の中で成立したコンピュータ
MITドレイパー研究所は、人間と機械を統合した意思決定システムという設計思想を確立した。では、その思想はどのようにして実際の装置として具現化されたのか。その答えが、Apollo Guidance Computer(AGC)である。
「存在しないもの」を作るという挑戦
アポロ計画が始まった1960年代初頭、NASAが求めたコンピュータは、まだこの世に存在していなかった。
必要とされたのは、小型であること、軽量であること、消費電力が低いこと、高い信頼性を持つこと、リアルタイムで動作することという、相反する条件を同時に満たす装置である。当時のコンピュータ技術では、それはほぼ不可能に近い要求であった。したがってAGCの開発とは、技術的制約の中で成立する新しい設計原理の創造であった。
AGCは、徹底的にシンプルに設計された。
- RAM:約4KB
- ROM:約36KB
- クロック:約1MHz
この限られた資源の中で重要だったのは、 何を入れるかではなく、何を捨てるかである。不要な機能はすべて排除、命令セットは最小限、構造は単純にこれは、性能ではなく、確実性を最優先する設計であった。
集積回路(IC)という賭け
AGCの成立を支えたのが、フェアチャイルド・セミコンダクターの集積回路(IC)である。当時、ICはまだ新しい技術であり、信頼性が十分に検証されていない、コストが高い、大量生産の経験が少ないという不確実性を抱えていた。

それでもNASAは、この技術を全面的に採用するという決断を下す。ここに、アポロ計画のもう一つの賭けがあった。
もし従来のトランジスタを使っていた場合、回路は巨大化し、消費電力は増大し故障率も上がる。結果として、宇宙船に搭載すること自体が不可能になる。ICは、小型化と信頼性を同時に実現する唯一の選択肢であった。
求められた精度と信頼性
しかしここで問題となるのが、そのICがどれほど信頼できるのかである。アポロ計画において、コンピュータの故障は、即座にミッションの失敗、すなわち人命の喪失につながる可能性を持っていた。したがってフェアチャイルドのICには、当時としては前例のないレベルの品質と精度が求められた。
具体的には、極めて低い故障率、長時間連続稼働への耐性、温度変化や振動への強さ、個体ごとのばらつきの最小化といった条件である。
興味深いのは、この信頼性が単に製造技術だけで担保されたわけではない点である。NASAは、徹底的なテストと選別を行った。すべてのICを検査、不良の可能性があるものは排除、実際の環境に近い条件でテスト。
つまり、「完璧に作る」のではなく、「使えるものだけを選び抜く」というアプローチである。このプロセスによって、ICは初めて「信頼できる部品」へと変わった
この要求は、単なる品質管理にとどまらない。結果として、半導体製造そのものの基準を引き上げることになる。製造プロセスの改善、品質管理の高度化、歩留まりの向上、これらはすべて、アポロ計画という巨大プロジェクトによって加速されたのである。
リアルタイム処理とソフトウェア設計
こうして完成したハードウェアの上で動いたのが、ソフトウェアである。中心にいたのは、マーガレット・ハミルトン 率いるチームであった。彼らは、優先順位制御、非同期処理、エラー処理といった仕組みを導入する。
特に重要なのは、エラーを排除するのではなく、エラーの中で動く設計である。この思想は、実際のミッションで試される。
アポロ11号の着陸時、コンピュータが過負荷状態に陥り、エラーが表示される。しかしAGCは停止しない。重要な処理を優先し、不要な処理を切り捨てた。その結果、月面着陸は成功する。ここに、ハードウェアの信頼性とソフトウェアの設計思想が統合された成果が現れている。
AGCの本質は、完全なシステムではないという点にある。ハードウェアにはばらつきがある、ソフトウェアには制約がある。それでも、システム全体として機能するように設計されていた。
つまり、極めて高い精度を要求しながら、不完全さを前提とするという、一見矛盾した構造が成立していたのである。
小まとめ
Apollo Guidance Computerは、限界の中で成立したコンピュータであり、極限の精度と信頼性を要求された半導体技術の結晶であった。
- フェアチャイルドのICが小型化を可能にし
- NASAの検証プロセスが信頼性を担保し
- ソフトウェア設計が不確実性に対応した
その結果として、人間とコンピュータが協働する宇宙飛行が実現したのである。そしてこの構造こそが、現代のデジタルシステムの原型となっている。
ロープメモリと身体性──プログラムはどのように作られたのか
前述のように、Apollo Guidance Computer(AGC)は、限られた資源と高い信頼性要求の中で成立したコンピュータであった。ここで重要なのは、そのコンピュータが、どのようにして実体として作られたのかという点である。
コンピュータは抽象的な存在ではない。それは必ず、物理的なプロセスを通じて形になる必要がある。
半導体産業の萌芽──アポロが作った基盤
AGCの基盤となった集積回路は、フェアチャイルド・セミコンダクター などによって供給された。この時期、シリコンを用いた半導体技術はまだ発展途上にあったが、アポロ計画による大量需要と厳格な品質要求によって、
- 製造プロセスの安定化
- 品質管理の高度化
- 量産体制の確立
が一気に進むことになる。
その結果として、半導体は研究対象から産業へと変化するさらに、この技術と人材の蓄積は、後のシリコンバレー形成の基盤ともなっていく。ただし、ここで強調すべきは、コンピュータは半導体だけでは完成しないという点である。
ロープメモリ──プログラムは「書く」ものではなかった
AGCにおいて、プログラムは通常の意味で「書かれる」ものではなかった。それは、Core Rope Memory(ロープメモリ)という方式で実装されていた。 これは現代のROMで、MITが設計し、レイセオン(Raytheon)社が製造した。
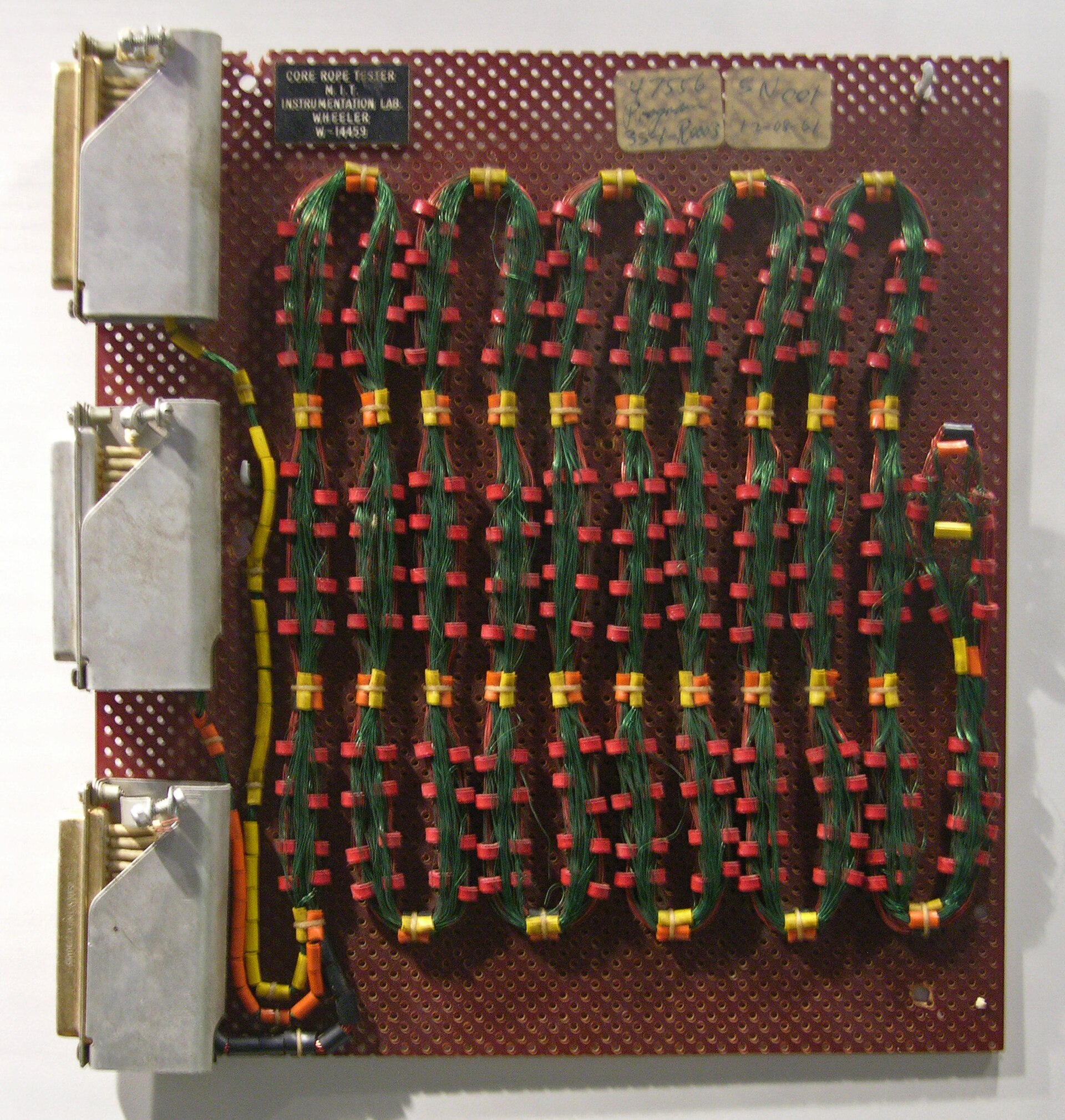
この仕組みは極めてユニークである。
- ワイヤをコアに通す → 1
- ワイヤを通さない → 0
つまり、プログラムそのものが物理的な構造として存在していたのである。ここでは、ソフトウェアとハードウェアの境界が存在しない
このロープメモリの製造は、完全な手作業によって行われた。細いワイヤを一本一本、決められた経路に沿って通していく。そこに求められるのは、ミスのない正確性、一貫した再現性、長時間の集中力である。
一度でも誤れば、プログラムそのものが誤動作する。つまり、コードのバグが、物理的なミスとして現れるのである。
女性たちの役割──身体による精度の実現
この作業を担ったのは、主に女性の作業者たちであった。彼女たちはしばしば、 “Little Old Ladies”と呼ばれていたが、この呼び名は本質を捉えていない。実際には、高度な技能を持った専門的な作業者であった。彼女たちは、織物のようにワイヤを扱いながら、プログラムを「編む」という行為を行っていた。
ここで注目すべきは、デジタル技術が身体的技能に依存していたという点である。
通常、コンピュータは抽象的・論理的な存在として理解される。アポロ計画においては、デジタルの正確性が、人間の手の精度によって担保されていたのである。手の動き、視覚的確認、触覚的な違和感。これらが、エラーを防ぐ最後の層として機能していた。
アポロ計画はしばしば、宇宙飛行士、エンジニア、コンピュータの物語として語られる。しかし実際には、その背後に、もう一つの層が存在していた。それが、人間の身体による精密作業である。この層は目立たない。しかし、これがなければ、システムは成立しない
「コードを書く」から「コードを作る」へ
現代のソフトウェア開発では、コードはキーボードで入力される。アポロでは、コードは物理的に作られていたこの違いは単なる技術の差ではない。プログラムという概念そのものの違いである。
- 現代:変更可能・可変
- アポロ:固定・物理化
この固定性が、高い信頼性を生む一方で、変更の難しさも伴っていた
小まとめ
アポロ計画におけるコンピュータは、半導体だけで成立したわけではない。それは、物理的な手作業によって完成されたシステムであった。半導体が計算の基盤を作り、ロープメモリがプログラムを固定し、女性たちの手が精度を担保した。
この構造によって、デジタルと身体が一体となったコンピュータが成立したのである。そしてこの事実は、テクノロジーの背後に常に人間が存在するという、極めて本質的な問いを私たちに投げかけている。
まとめ
アポロ計画の本質は、人間とコンピュータの関係の再設計にあった。コンピュータは計算装置ではなく、意思決定を担う存在として組み込まれた。
その背後には、
- 半導体産業
- ロープメモリという物理的プログラム
- そして人間の手
があった。要は、デジタルは人間の上に成立しているということである。
人間と機械は、分離ではなく協働するアポロが示したこの構造は、現代にもそのまま続いている、といって良い。
【アポロ計画シリーズ──全11回】
- ① アポロ計画は「失敗の科学」だった
- ② 宇宙は「飛ぶ」のか「落ちる」のか
- ③ 宇宙飛行士とMission Controlが作った「人材採用基準」
- ④ ロケットはなぜ遠くまで飛ぶのか
- ⑤ フォン・ブラウンとコロリョフが動かした組織の構造
- ⑥ NASAの文化はどのように作られたのか
- ⑦ コンピュータはどのように月へ行ったのか(この記事)
- ⑧ アポロ計画とアルテミス計画は何が違うのか
- ⑨ 「アルテミスII」の月面接近成功
- ⑩ 宇宙服はどのように進化したのか
- ⑪ 宇宙とつながる技術の進化
← 前の記事:⑥ NASAの文化はどのように作られたのか
→ 次の記事:⑧ アポロ計画とアルテミス計画は何が違うのか
シリーズ全体の地図:アポロ計画シリーズ(①〜⑪)読み方ガイド
このシリーズを読み終えたら:宇宙・組織シリーズ──認識のOSを宇宙で実証する(全4回)